Inzicht in de soorten processen die kunnen worden uitgevoerd op een puntenwolk
Puntwolken worden steeds populairder voor gebruik in verschillende industrieën, waaronder de bouw, landmeetkunde en techniek. Een puntenwolk is een 3D-weergave van een omgeving die wordt gemaakt door laser- of fotogrammetrische gegevens vast te leggen en te verwerken. Zodra een puntenwolk is gemaakt, kunnen er verschillende processen op de gegevens worden uitgevoerd om zinvolle inzichten te verkrijgen en waardevolle resultaten te produceren. In deze blogpost verkennen we de verschillende soorten processen die op een puntenwolk kunnen worden toegepast.
Filteren en reinigen
Voordat enige andere verwerking kan plaatsvinden, moeten de puntenwolkgegevens worden opgeschoond en gefilterd om ruis, fouten en andere ongewenste gegevens te verwijderen. Dit is belangrijk om ervoor te zorgen dat de verdere verwerking nauwkeurig en betrouwbaar is. Filters kunnen worden gebruikt om uitschieters te verwijderen, oppervlakken glad te maken en ruis te verwijderen.
Registratie en uitlijning
Puntwolken kunnen worden gegenereerd uit verschillende bronnen en de gegevens kunnen op verschillende tijdstippen en vanaf verschillende posities worden vastgelegd. Om een uniforme puntenwolk van de hele omgeving te maken, moeten meerdere puntenwolken worden uitgelijnd en samen geregistreerd. Dit proces omvat het identificeren van gemeenschappelijke punten tussen de verschillende puntenwolken en ze uitlijnen op een gemeenschappelijk coördinatensysteem.
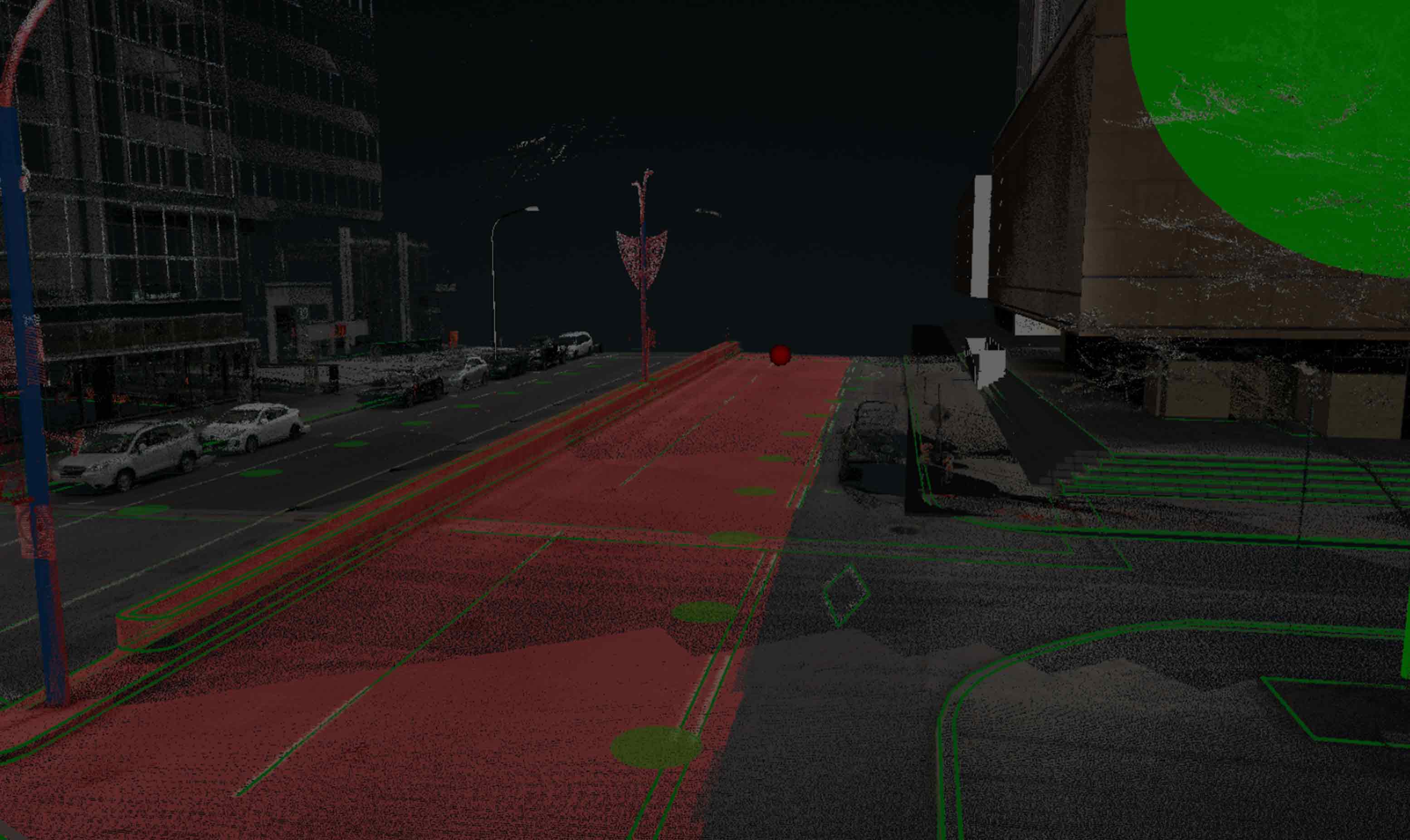
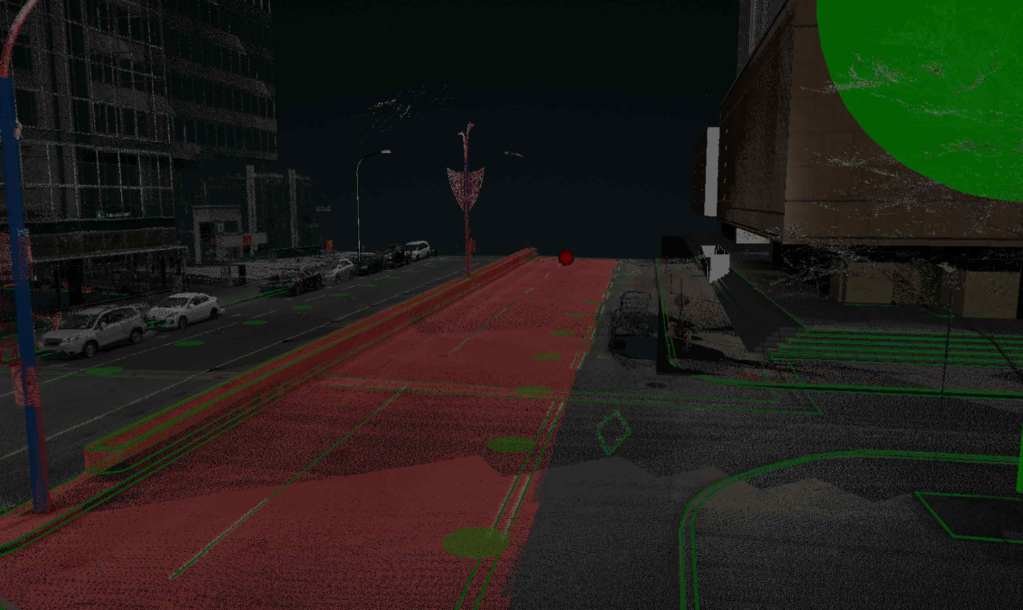
Segmentatie
Segmentatie is het proces waarbij een puntenwolk wordt opgedeeld in zinvolle componenten of objecten. Dit kan worden gedaan met behulp van verschillende technieken, waaronder geometrische kenmerkextractie, segmentatie op basis van kleur en algoritmen voor clustering. Het doel van segmentatie is om afzonderlijke objecten of gebieden in de omgeving te identificeren die verder kunnen worden geanalyseerd.
Eigenschapsextractie
Bij kenmerkextractie worden zinvolle kenmerken geïdentificeerd en geëxtraheerd uit de puntenwolkgegevens. Dit kan het identificeren van randen, hoeken en andere kenmerken omvatten die belangrijk zijn voor latere analyse. Eigenschapsextractie wordt vaak gebruikt bij objectherkenning, waarbij specifieke interessante objecten in de omgeving moeten worden geïdentificeerd en gelokaliseerd.
3D-modellering
Nadat de puntenwolk is gefilterd, uitgelijnd, gesegmenteerd en kenmerken zijn geëxtraheerd, kan deze worden gebruikt om 3D-modellen van de omgeving te maken. Deze modellen kunnen worden gebruikt voor verschillende toepassingen, waaronder virtual reality-simulaties, het modelleren van gebouwinformatie en augmented reality-ervaringen.
Analyse en meting
Tot slot kan de verwerkte puntenwolk worden gebruikt om verschillende analyses en metingen uit te voeren. Deze omvatten het meten van afstanden, oppervlakten en volumes, maar ook het analyseren van oppervlaktekromming en het identificeren van defecten of onregelmatigheden. Deze analyses kunnen worden gebruikt voor verschillende toepassingen, zoals kwaliteitscontrole, constructieanalyse en omgevingsmonitoring.
Samenvattend zijn puntenwolken een rijke bron van gegevens die voor verschillende toepassingen kunnen worden gebruikt. Van filteren en opschonen tot 3D-modellering en analyse, er zijn een aantal processen die kunnen worden uitgevoerd op puntenwolkgegevens om waardevolle inzichten te verkrijgen en waardevolle resultaten te produceren. Door de soorten processen te begrijpen die kunnen worden uitgevoerd, kunt u het volledige potentieel van puntenwolkgegevens in uw werk ontsluiten.
VisionLidar biedt een uitgebreide reeks tools voor het voorbewerken, classificeren, visualiseren en analyseren van puntenwolkgegevens, inclusief geavanceerde functies zoals AI-gestuurde deep learning classificatie en objectdetectie. Deze mogelijkheden maken efficiënte data-integratie, metingen en analyses op maat mogelijk, waardoor het een bron van onschatbare waarde is voor toepassingen in stedelijke planning, bouw en milieumonitoring.
We horen graag over je project! Neem gewoon contact op.