Розуміння типів процесів, які можна виконати над хмарою точок
Хмари точок стають все більш популярними для використання в різних галузях, включаючи будівництво, геодезію та інженерію. Хмара точок - це 3D-представлення середовища, створене шляхом збору та обробки лазерних або фотограмметричних даних. Після створення хмари точок існує безліч процесів, які можна виконати над даними, щоб отримати значущу інформацію та отримати цінні результати. У цій статті ми розглянемо різні типи процесів, які можна застосувати до хмари точок.
Фільтрація та очищення
Перш ніж виконувати будь-яку іншу обробку, дані хмари точок необхідно очистити і відфільтрувати, щоб видалити шум, помилки та інші небажані дані. Це важливо для забезпечення точності та надійності подальшої обробки. Фільтри можна використовувати для видалення викидів, згладжування поверхонь і видалення шуму.
Реєстрація та узгодження
Хмари точок можуть бути створені з різних джерел, а дані можуть бути зняті в різний час і з різних позицій. Щоб створити єдину хмару точок всього навколишнього середовища, кілька хмар точок повинні бути вирівняні та зареєстровані разом. Цей процес передбачає визначення спільних точок між різними хмарами точок і вирівнювання їх у спільній системі координат.
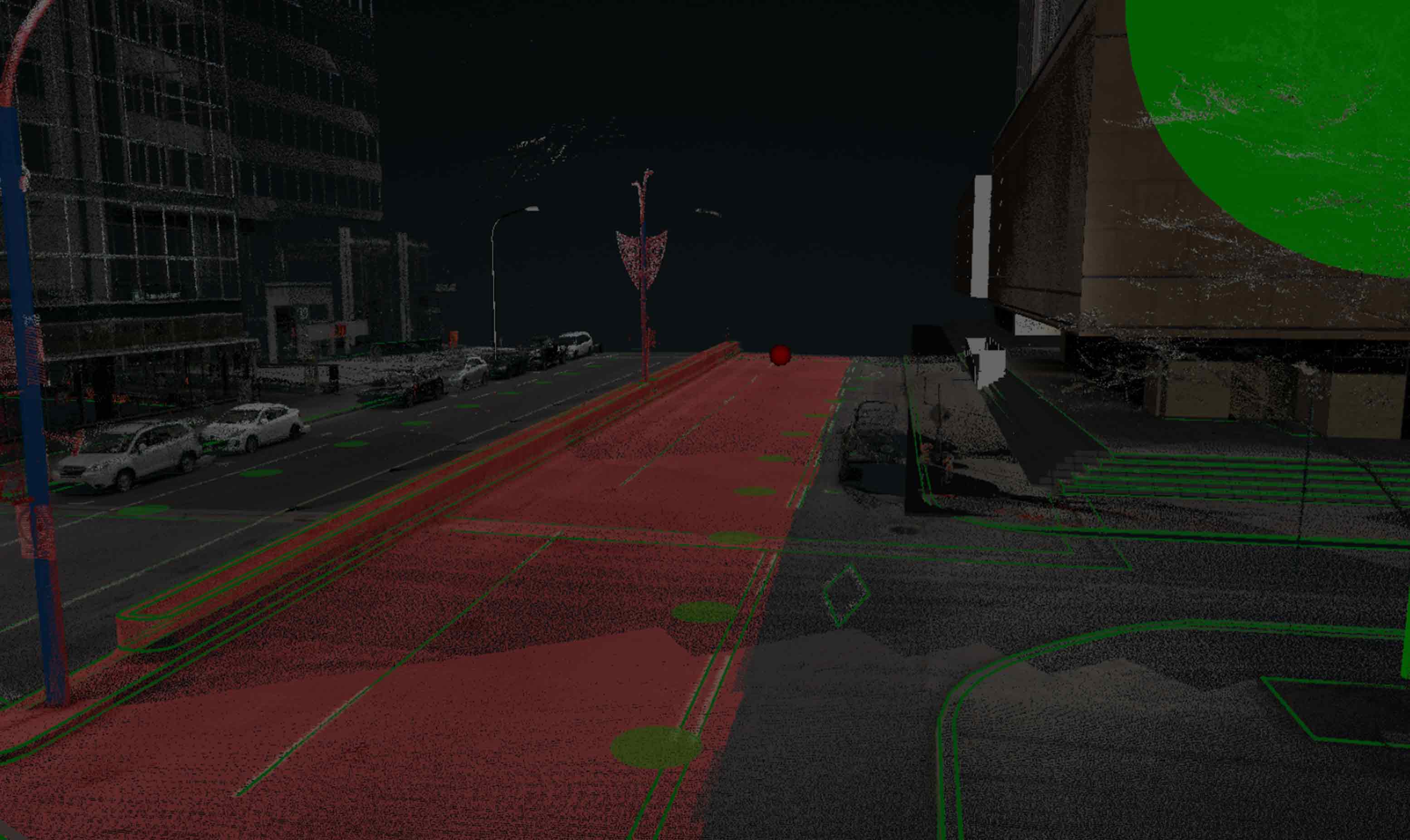
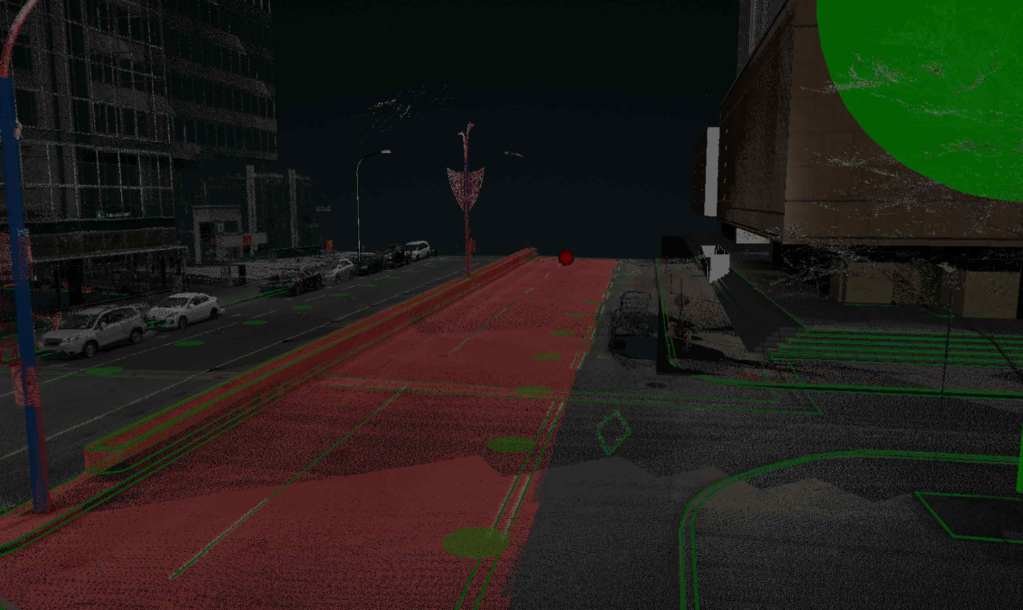
Сегментація
Сегментація - це процес поділу хмари точок на значущі компоненти або об'єкти. Це можна зробити за допомогою різних методів, включаючи виділення геометричних ознак, сегментацію на основі кольору та алгоритмів кластеризації. Метою сегментації є ідентифікація окремих об'єктів або регіонів навколишнього середовища, які потім можуть бути проаналізовані.
Вилучення особливостей
Виділення об'єктів передбачає ідентифікацію та вилучення значущих об'єктів з даних хмари точок. Це може включати визначення ребер, кутів та інших особливостей, важливих для подальшого аналізу. Виділення ознак часто використовується для розпізнавання об'єктів, коли потрібно ідентифікувати конкретні об'єкти, що представляють інтерес, і визначити їхнє місцезнаходження в навколишньому середовищі.
3D моделювання
Після того, як хмару точок відфільтровано, вирівняно, сегментовано та вилучено особливості, її можна використовувати для створення 3D-моделей навколишнього середовища. Ці моделі можна використовувати для широкого спектру застосувань, включаючи симуляції віртуальної реальності, інформаційне моделювання будівель та доповнену реальність.
Аналіз та вимірювання
Нарешті, оброблену хмару точок можна використовувати для виконання різноманітних аналізів і вимірювань. До них відносяться вимірювання відстаней, площ і об'ємів, а також аналіз кривизни поверхні і виявлення дефектів або нерівностей. Ці аналізи можуть бути використані для різних застосувань, включаючи контроль якості, структурний аналіз і моніторинг навколишнього середовища.
Отже, хмари точок - це багате джерело даних, яке можна використовувати для різноманітних застосувань. Від фільтрації та очищення до 3D-моделювання та аналізу - існує цілий ряд процесів, які можна виконувати над даними хмари точок, щоб отримати цінну інформацію та отримати цінні результати. Розуміння типів процесів, які можна виконувати, допоможе вам розкрити весь потенціал даних хмари точок у вашій роботі.
VisionLidar надає комплексний набір інструментів для попередньої обробки, класифікації, візуалізації та аналізу даних хмари точок, включаючи розширені функції, такі як класифікація та виявлення об'єктів на основі глибокого навчання зі штучним інтелектом. Ці можливості дозволяють ефективно інтегрувати, вимірювати та аналізувати дані, що робить його безцінним ресурсом для застосування в міському плануванні, будівництві та моніторингу навколишнього середовища.
Ми будемо раді почути про ваш проект! Просто зв'яжіться з нами.