点群に対して実行可能な処理の種類を理解する
ポイントクラウドは、建設、測量、エンジニアリングなど、さまざまな業界で使用されるようになってきています。点群とは、レーザーまたは写真測量データを取り込み、処理することによって作成される環境の3D表現です。点群データを作成した後は、そのデータに対してさまざまな処理を行うことで、意味のある知見を抽出し、価値ある結果を得ることができます。このブログポストでは、点群に適用できるさまざまな種類の処理について説明します。
フィルタリングとクリーニング
他の処理を行う前に、点群データはノイズやエラー、その他の不要なデータを除去するために、クリーニングとフィルタリングを行う必要があります。これは、その後の処理を正確で信頼できるものにするために重要です。フィルターは、外れ値の除去、表面の平滑化、ノイズの除去に使用することができます。
登録とアライメント
点群は様々なソースから生成され、データは異なる時間、異なる位置から取得されることがあります。環境全体の統一された点群を作成するためには、複数の点群の位置合わせと登録が必要です。このプロセスでは、異なる点群間の共通点を特定し、共通の座標系に整列させる。
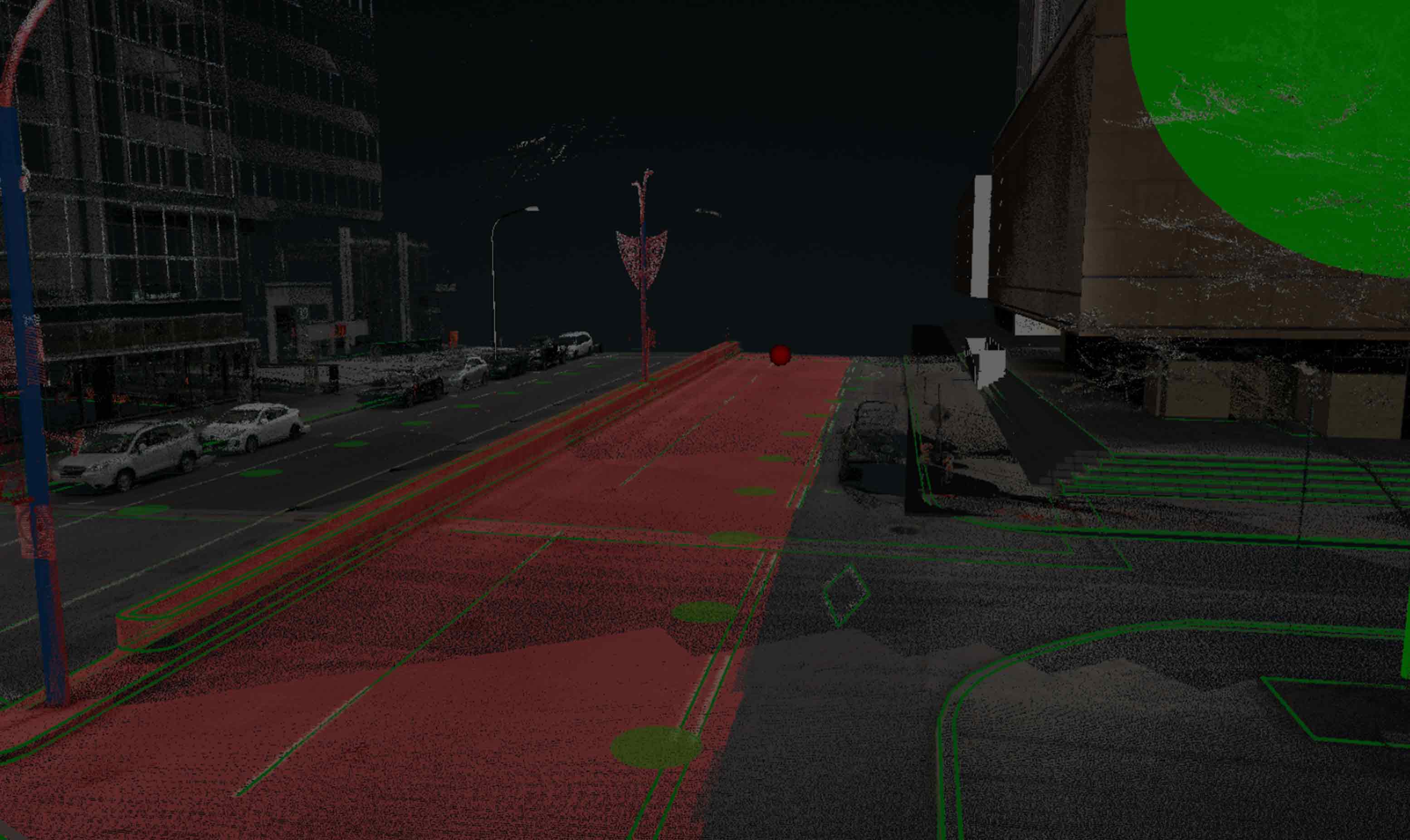
セグメンテーション
セグメンテーションとは、点群を意味のあるコンポーネントやオブジェクトに分割するプロセスである。これは、幾何学的特徴抽出、カラーベースのセグメンテーション、クラスタリングアルゴリズムなど、さまざまな技術を使用して行うことができる。セグメンテーションの目的は、個々のオブジェクトや環境の領域を特定し、それをさらに分析することである。
特徴抽出
特徴抽出では、点群データから意味のある特徴を特定し、抽出する。これには、エッジやコーナーなど、その後の分析に重要な特徴を特定することが含まれます。特徴抽出は、特定の対象物を識別し、環境内の位置を特定する必要がある物体認識でよく使用されます。
3Dモデリング
点群のフィルタリング、位置合わせ、セグメンテーション、特徴抽出を行った後、環境の3Dモデルを作成するために使用することができます。このモデルは、バーチャルリアリティシミュレーション、ビルディングインフォメーションモデリング、拡張現実体験など、さまざまな用途に使用することができる。
分析・測定
最後に、処理された点群を使って様々な分析や測定を行うことができる。これには、距離、面積、体積の測定、表面曲率の分析、欠陥や凹凸の特定などが含まれる。これらの解析は、品質管理、構造解析、環境モニタリングなど、さまざまな用途に使用できる。
要約すると、点群データはさまざまな用途に使用できる豊富なデータ源である。フィルタリングやクリーニングから3Dモデリングや解析に至るまで、点群データに対して実行できる処理は数多くあり、貴重な洞察を引き出し、価値ある結果を生み出すことができます。実行可能な処理の種類を理解することで、点群データの可能性を最大限に引き出すことができます。
VisionLidar は、点群データの前処理、分類、可視化、解析のための包括的なツール群を提供し、AI 駆動のディープラーニングによる分類や物体検出などの高度な機能も備えています。これらの機能により、効率的なデータ統合、測定、カスタム分析が可能になり、都市計画、建設、環境モニタリングなどのアプリケーションにとって非常に貴重なリソースとなります。
あなたのプロジェクトについてぜひお聞かせください! 連絡する.