了解可在点云上执行的处理类型
点云在建筑、测量和工程等各行各业的应用日益普及。点云是通过捕捉和处理激光或摄影测量数据创建的环境三维表示。一旦创建了点云,就可以对数据进行各种处理,以提取有意义的见解并产生有价值的结果。在本博文中,我们将探讨可应用于点云的不同类型的处理。
过滤和清洁
在进行任何其他处理之前,必须对点云数据进行清理和过滤,以去除噪音、错误和其他不需要的数据。这对于确保后续处理的准确性和可靠性非常重要。过滤器可用于去除异常值、平滑表面和去除噪声。
登记和调整
点云可以从各种来源产生,数据可以在不同的时间和不同的位置采集。为了创建整个环境的统一点云,必须将多个点云对齐并注册在一起。这个过程涉及到识别不同点云之间的共同点,并将它们对齐到一个共同的坐标系。
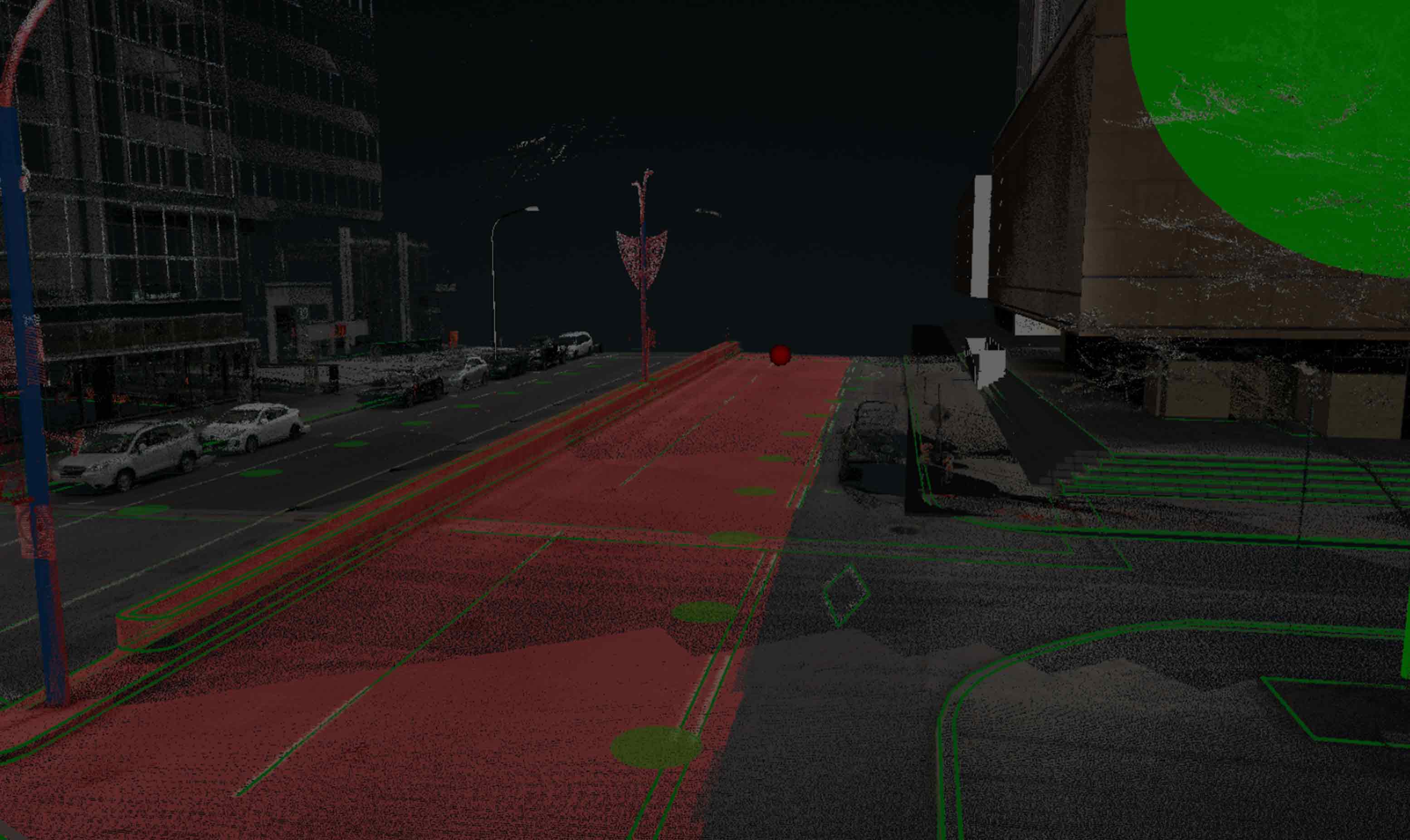
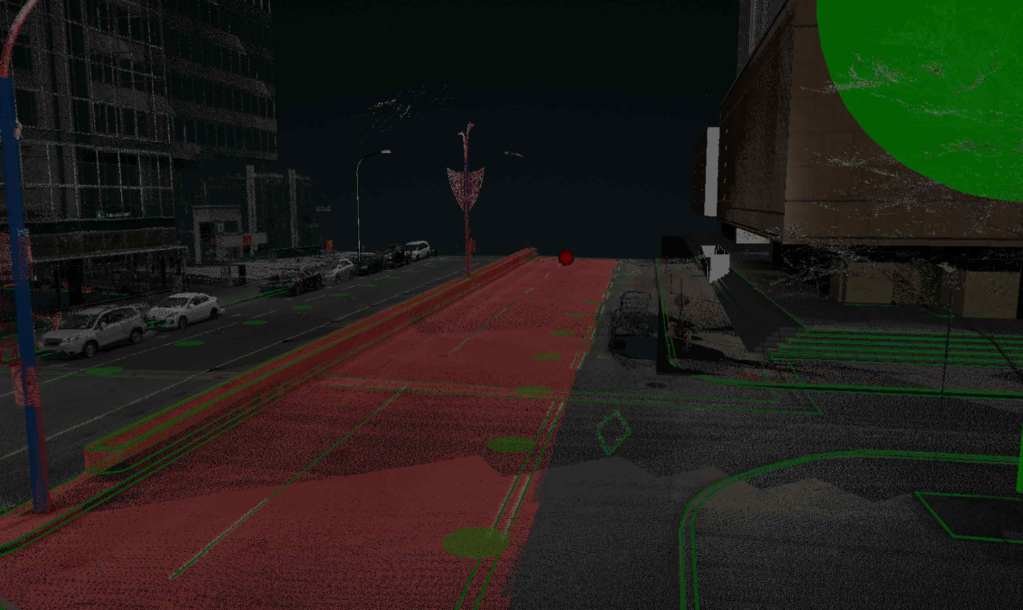
分割
分割是将点云划分为有意义的组成部分或对象的过程。这可以通过各种技术来完成,包括几何特征提取、基于颜色的分割和聚类算法。分割的目的是为了识别环境中的单个物体或区域,然后可以进一步分析。
特征提取
特征提取包括从点云数据中识别和提取有意义的特征。这可以包括识别边缘、角落和其他对后续分析很重要的特征。特征提取通常用于物体识别,在这种情况下,需要识别和定位环境中的特定感兴趣的物体。
三维建模
一旦点云被过滤、对齐、分割并提取出特征,就可以用来创建环境的三维模型。这些模型可用于广泛的应用,包括虚拟现实模拟、建筑信息建模和增强现实体验。
分析和测量
最后,经过处理的点云可用于执行各种分析和测量。其中包括测量距离、面积和体积,以及分析表面曲率和识别缺陷或不规则。这些分析可用于各种应用,包括质量控制、结构分析和环境监测。
总之,点云是一种丰富的数据源,可用于多种应用。从过滤和清理到三维建模和分析,可以对点云数据进行多种处理,以提取有价值的见解并产生有价值的结果。通过了解可执行的流程类型,您可以在工作中充分挖掘点云数据的潜力。
VisionLidar 提供了一套全面的点云数据预处理、分类、可视化和分析工具,包括人工智能驱动的深度学习分类和目标检测等高级功能。这些功能实现了高效的数据集成、测量和定制分析,使其成为城市规划、建筑和环境监测等应用领域的宝贵资源。
我们很乐意了解您的项目! 联系我们.